
AeroLeads people directory · profile
Barrett Ames Email & Phone Number
Founder
at
Stealth AI Startup
1 work email found
@duke.edu
3 phones found area 480 and 607
LinkedIn matched
✓ Verified Jul 2026
4 data sources
Profile completeness 100%
Current company
Role
Founder
Location
Durham, North Carolina, United States
Company size
Who is Barrett Ames? Overview
A concise factual answer block for searchers comparing this professional profile.
Quick answer
Barrett Ames is listed as Founder at Stealth AI Startup, a with 4857 employees, based in Durham, North Carolina, United States. AeroLeads shows a work email signal at duke.edu, phone signal with area code 480, 607, and a matched LinkedIn profile for Barrett Ames.
Barrett Ames previously worked as Co-Founder and CEO at Botbuilt and Co-Founder at Botbuilt. Barrett Ames holds Doctor Of Philosophy - Phd, Artificial Intelligence And Robotics from Duke University.
Company email context
Email format at Stealth AI Startup
This section adds company-level context without repeating Barrett Ames's masked contact details.
{first}.{last}@duke.edu
86% confidence
AeroLeads found 1 current-domain work email signal for Barrett Ames. Compare company email patterns before reaching out.
Profile bio
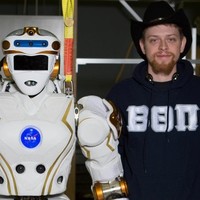
About Barrett Ames
I want people to be free to think, to be creative, to follow their passion. That's why I love robots, because they enable people to leave behind the drudgery, to become fully human and not half robot. To this end I became a software engineer with a smattering of math, mechanical and electrical engineering, all in hopes of making the biggest splash I can in the robotics field. I'm on linkedin to learn about projects, advise others as they pick up similar paths, and keep abreast of the latest in robotics technology. Cheers!
Listed skills include Robotics, C, Matlab, Programming, and 30 others.
Current workplace
Barrett Ames's current company
Company context helps verify the profile and gives searchers a useful next step.
19 roles · 22 years
Barrett Ames work experience
A career timeline built from the work history available for this profile.

Co-Founder And Ceo
Co-Founder
CurrentAt BotBuilt we develop novel technical approaches to building homes and home components. We apply state-of-the-art robotics to help bring affordable housing to the world.
Jan 2021 - Present

Adjunct Professor
Developed and taught Advanced Robotics, a graduate level course providing a breadth of techniques that are used across the robotics stack.
Jan 2024 - Nov 2024
Phd Scholar
I develop novel methods for the integration of modern learning with controls and planning, with a focus on arms and humanoid robots. During my time at Duke, I've been awarded two fellowships, one of which is the NDSEG Fellowship, I am grateful to have been awarded this fellowship and to have been able to spend time in the company of the top 200 STEM graduate students from my year. In addition, in 2019 my work on stability, and performance was nominated for best paper at IROS. A full list of my publications is available below.
Aug 2015 - Oct 2022

Research Scientist Intern
In order to minimize the wear and tear of industrial arms, some manufacturers enforce jerk limits. Quickly (<10ms) calculating the optimal time parameterization of motion plans while respecting jerk limits is a challenging problem. During my time at Realtime Robotics I developed a novel approach to performing this task, which resulted in a patent application and improved robot performance.
Apr 2019 - Sep 2019

Intern
Working with the Home Robotics team to support the goal of aging in place.
Jun 2017 - Sep 2017
Robotics Engineer
Traclabs Inc
Developing point cloud processing software to detect grasp points for Robonaut 2's station legs. This will be vital to R2's operations on the International Space Station.
May 2014 - Sep 2015
Founder/Managing Director
Talos
Design, develop, and test mechatronics prototypes.
Mar 2014 - Sep 2015

Software Engineer
Designed, developed, and operated perception system for NASA JSC Project Valkyrie for the DARPA Robotics Challenge. Post December 2013, I have been developing a novel compression algorithm for 3D data. Responsibilities: • Researched and developed filters and calibration methods for Time Of Flight cameras • Developed drivers for Microstrain IMUs • Implemented and tested Extended Kalman Filter on humanoid robot • Implemented visual odometry using 3D data • Implemented 3D composite using multiple sensors and Octomap • Operated the perception system of the robot at DARPA Robotics Challenge Trials 2013 • Conceived and implemented novel point cloud compression algorithm
Aug 2013 - Apr 2014
Founder/Chief Software Engineer
Min3
Research and Development of novel consumer robotics
Aug 2013 - Mar 2014

Research Programmer
Designed, developed, and operated perception system for NASA JSC Project Valkyrie for the DARPA Robotics Challenge. Responsibilities:• Designed coherent system for analyzing and leveraging perception data on humanoid robot.• Selected sensors for outdoor operation• Unit tested sensors for outdoor operation • Developed grasp point identifier using 3D sensors and semi-definite convex optimization • Maintained software for operating robot in Gazebo simulation environment• Developed Primitive Shape Decomposition compact representation of 3D data
Oct 2012 - Aug 2013
Partner
Thorpe Seeop
Continued development of a small pneumatically launched Unmanned Aerial System for anti-piracy operations Responsibilities:• Re-evaluation of the flightworthiness of the airframe • Change of launch procedure based on re-evaluation • Development of mechanical spring system for extending tail fins • Extensive testing of airframe and launch procedure
Apr 2012 - Jul 2012

Intern
Ruby on Rails development for corporate social media Responsibilities:• Debugged front-end issues• Worked in an Agile Environment • Worked with CSS, HTML, and Ruby
Jan 2012 - Mar 2012
Intern Innovator
Developed iOS applications and attended Startup Weekend Las Vegas Responsibilities:• Development of iOS application following company standards • Operation in a Agile Software Development environment • Interacted with customer to understand their needs • Worked extensively with bluetooth based techonology
Jun 2011 - Sep 2011
Intern
Developed autonomous ground vehicle Responsibilities:• Selection of hardware for unmanned ground vehicle • Construction of ground vehicle • Developed planning and control software • Developed user interface, including intelligent area covering algorithm
Jun 2010 - Aug 2010

Information Technology Intern
Monitor and Manage the Unix and Windows systems at Charles Schwab.
Jun 2009 - Aug 2009

Intern
* Created firmware for energy meter, written in C. * Kept inventory of development boards. * Performed many types of soldering procedures. * Assisted with conferences. * Assisted with definition of robot controller.
Jun 2008 - Jan 2009

Intern
* Assisted doctors with experiments, including creation of chemical solutions and DNA testing. * Performed minor procedures on mice, including autopsies and limb removal. * Participated in the creation of clones and genetically engineered mice. * Created computer program for calculating dosages needed for experiments.
2005 - 2007
~2 yrs
4 education records
Barrett Ames education
Doctor Of Philosophy - Phd, Artificial Intelligence And Robotics
Duke University
Bachelor Of Science (B.S.), Robotics
Cornell University
Education record
Brophy College Preparatory
Education record
Duke University
FAQ
Frequently asked questions about Barrett Ames
Quick answers generated from the profile data available on this page.
What company does Barrett Ames work for?
Barrett Ames works for Stealth AI Startup.
What is Barrett Ames's role at Stealth AI Startup?
Barrett Ames is listed as Founder at Stealth AI Startup.
What is Barrett Ames's email address?
AeroLeads has found 1 work email signal at @duke.edu for Barrett Ames at Stealth AI Startup.
What is Barrett Ames's phone number?
AeroLeads has found 3 phone signal(s) with area code 480, 607 for Barrett Ames at Stealth AI Startup.
Where is Barrett Ames based?
Barrett Ames is based in Durham, North Carolina, United States while working with Stealth AI Startup.
What companies has Barrett Ames worked for?
Barrett Ames has worked for Stealth Ai Startup, Botbuilt, Duke University, Realtime Robotics, Inc., and Toyota Research Institute.
How can I contact Barrett Ames?
You can use AeroLeads to view verified contact signals for Barrett Ames at Stealth AI Startup, including work email, phone, and LinkedIn data when available.
What schools did Barrett Ames attend?
Barrett Ames holds Doctor Of Philosophy - Phd, Artificial Intelligence And Robotics from Duke University.
What skills is Barrett Ames known for?
Barrett Ames is listed with skills including Robotics, C, Matlab, Programming, Python, Simulations, Software Development, and C++.
Find 750M verified contacts
Search by job title, company, industry, location, and seniority. Export verified B2B contact data when you need it.
Start free trial